Scientific articles
More articles are available on Google Scholar.
Ontology-Driven Robotic Specification Synthesis
This paper addresses robotic system engineering for safety- and mission-critical applications by bridging the gap between high-level objectives and formal, executable specifications. The proposed method, Robotic System Task to Model Transformation Methodology (RSTM2) is an ontology-driven, hierarchical approach using stochastic timed Petri nets with resources, enabling Monte Carlo simulations at mission, system, and subsystem levels. A hypothetical case study demonstrates how the RSTM2 method supports architectural trades, resource allocation, and performance analysis under uncertainty. Ontological concepts further enable explainable AI-based assistants, facilitating fully autonomous specification synthesis. The methodology offers particular benefits to complex multi-robot systems, such as the NASA CADRE mission, representing decentralized, resource-aware, and adaptive autonomous systems of the future.
M. Figat, R. M. Mackey, and M. D. Ingham, “Ontology-driven robotic specification synthesis,” in arXiv, 2602.05456, 2026, https://doi.org/10.48550/arXiv.2602.05456


Simplification of Robotic System Model Analysis by Petri Net Meta-Model Property Transfer
This paper presents a simplification of robotic system model analysis due to the transfer of Robotic System Hierarchical Petri Net (RSHPN) meta-model properties onto the model of a designed system. Key contributions include: 1) analysis of RSHPN meta-model properties; 2) decomposition of RSHPN analysis into analysis of individual Petri nets, thus the reduction of state space explosion; and 3) transfer of RSHPN meta-model properties onto the produced models, hence elimination of the need for full re-analysis of the RSHPN model when creating new robotic systems. Only task-dependent parts of the model need to be analyzed. This approach streamlines the analysis thus reducing the design time. Moreover, it produces a specification which is a solid foundation for the implementation of the system. The obtained results highlight the potential of Petri nets as a valuable formal framework for analyzing robotic system properties.
M. Figat and C. Zieliński, "Simplification of Robotic System Model Analysis by Petri Net Meta-Model Property Transfer," in IEEE Access, 2026, doi: https://doi.org/10.1109/ACCESS.2026.3663096
Synthesis of Robotic System Controllers using Robotic System Specification Language
Robotic System Specification Language (RSSL) stems from the embodied agent approach to robotic system design. It enables the specification of both the structure and activities of a multi-robot multi-agent robotic system. RSSL specification can be verified and automatically transformed by its compiler into a six-layered Robotic System Hierarchical Petri Net (RSHPN). RSHPN models the activities and structure of the designed robotic system. The automatically generated RSHPN is loaded into RSHPN Tool modeling RSHPNs and automatically generating the controller code. This approach was validated on several robotic systems. The use of RSSL and RSHPN facilitates the synthesis of robotic system controllers.
M. Figat and C. Zieliński, "Synthesis of Robotic System Controllers Using Robotic System Specification Language," in IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 688-695, Feb. 2023, doi: 10.1109/LRA.2022.3229231.

Parameterised robotic system meta-model expressed by Hierarchical Petri nets
The paper presents a model-based approach to developing robotic system controllers. Central to this approach is a parameterised meta-model that describes the generic robotic system from two points of view: structure and activity. By appropriate parameterisation of the meta-model one can obtain a particular model of a robotic system performing desired tasks. The meta-model is expressed using the Robotic System Hierarchical Petri Net (RSHPN), a 6-layer Petri net tailored for robotics. Each layer describes the activity of the robotic system at a completely different level of abstraction. This guarantees the separation of concerns. The required model emerges from the meta-model by appropriate parameterisation of the layers of the RSHPN. Introduction of parameterisation enables the robot designer to focus only on the concepts derived from the domain. It greatly facilitates the robotic system development process as it gives the designer clear guidance on what needs to be defined and what is imposed by the design pattern. The resulting single RSHPN model is used both to verify some properties of the system, e.g. lack of deadlocks, but also to automatically generate controller code. The presented approach is illustrated by examples of the creation of two different robotic systems.
Maksym Figat, Cezary Zieliński, Parameterised robotic system meta-model expressed by Hierarchical Petri nets, Robotics and Autonomous Systems, Volume 150, 2022, 103987, ISSN 0921-8890, https://doi.org/10.1016/j.robot.2021.103987.
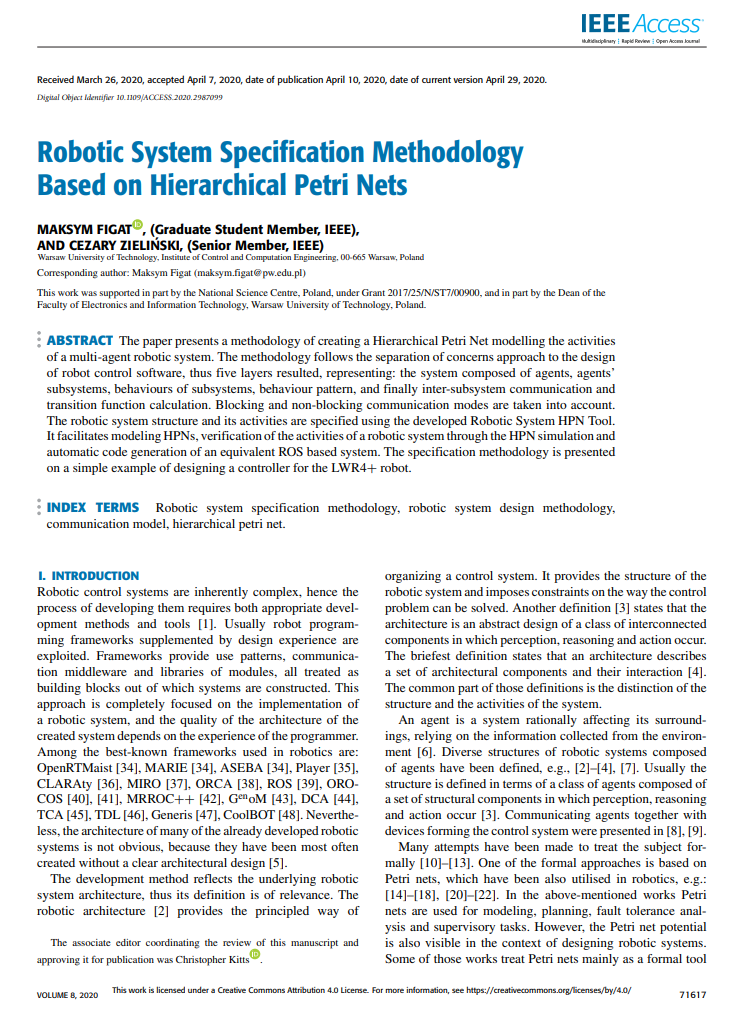
Robotic System Specification Methodology Based on Hierarchical Petri Nets
The paper presents a methodology of creating a Hierarchical Petri Net modelling the activities of a multi-agent robotic system. The methodology follows the separation of concerns approach to the design of robot control software, thus five layers resulted, representing: the system composed of agents, agents' subsystems, behaviours of subsystems, behaviour pattern, and finally inter-subsystem communication and transition function calculation. Blocking and non-blocking communication modes are taken into account. The robotic system structure and its activities are specified using the developed Robotic System HPN Tool. It facilitates modeling HPNs, verification of the activities of a robotic system through the HPN simulation and automatic code generation of an equivalent ROS based system. The specification methodology is presented on a simple example of designing a controller for the LWR4+ robot.
M. Figat and C. Zieliński, "Robotic System Specification Methodology Based on Hierarchical Petri Nets," in IEEE Access, vol. 8, pp. 71617-71627, 2020, doi: 10.1109/ACCESS.2020.2987099.
Methodology of Designing Multi-agent Robot Control Systems Utilising Hierarchical Petri Nets
A robot system is designed as a set of embodied agents. An embodied agent is decomposed into cooperating subsystems. In our previous work activities of subsystems were defined by hierarchical finite state machines. With their states activities were associated. In that approach communication between subsystems was treated as an implementation issue. This paper represents activities of a robot system using hierarchical Petri nets with conditions. Such net is created by specifying consecutive layers: multi-agent robot system layer, agent layer, subsystem layer, behaviour layer and communication layer. This decomposition not only organizes in a systematic manner the development of a robot system, but also introduces a comprehensive description of concurrently acting subsystems. Based on those theoretical considerations, a tool was created for producing hierarchical Petri nets defining the model of a robotic system and enabling automatic generation of the robot controller code, resulting in a significant acceleration of the implementation phase. The capabilities of the tool are presented by the development of a robot controller performing a rudimentary task.
M. Figat and C. Zieliński, "Methodology of Designing Multi-agent Robot Control Systems Utilising Hierarchical Petri Nets," 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 2019, pp. 3363-3369, doi: 10.1109/ICRA.2019.8794201.